其實標題打自走車好像不太好?
如果在google搜尋「自走車」的話,會出現下面這種工程作業用的自走車。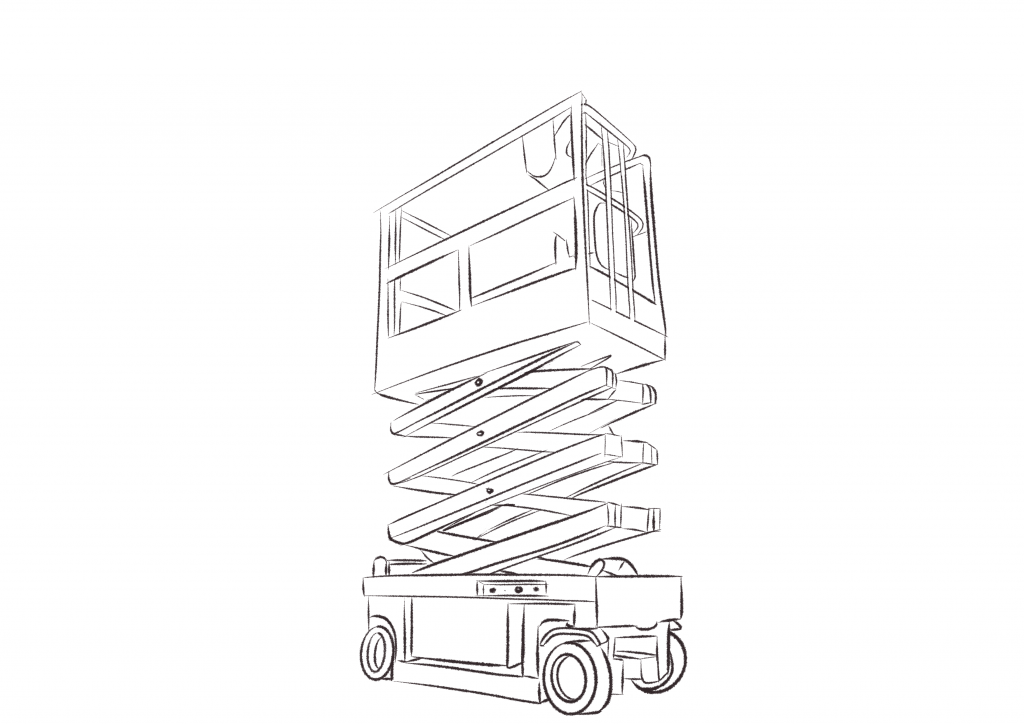
據我淺淺的了解,他還是需要遙控器來進行升降、位移,雖然我是營建系學生,不過我並沒有實際操作過,要操作的話得考證照哦!那我標題所說的自走車,並不是這種!!
正確來說應該叫做「自主移動機器人Autonomous Mobile Robot,AMR」,也有人叫做Self-Driving Robot,是能夠自主導航並且移動的機械載具,上面可以依據任務需求搭載各式各樣的設備,餐廳常看到的送餐喵喵機器人、加上攝影機的無人飛機等等。
與傳統的「無人搬運車Automated Guided Vehicle,AGV」的差異在AGV需事先建立好路徑(膠帶、路標、軌道...),AGV就會沿著這條路徑移動,相對的AMR則是透過自身的計算來規劃移動路徑,有較高的機動性。這個概念延伸到汽車上就變成無人駕駛汽車,但在現實上、法規上「完全的自動駕駛汽車」還未能商業化。
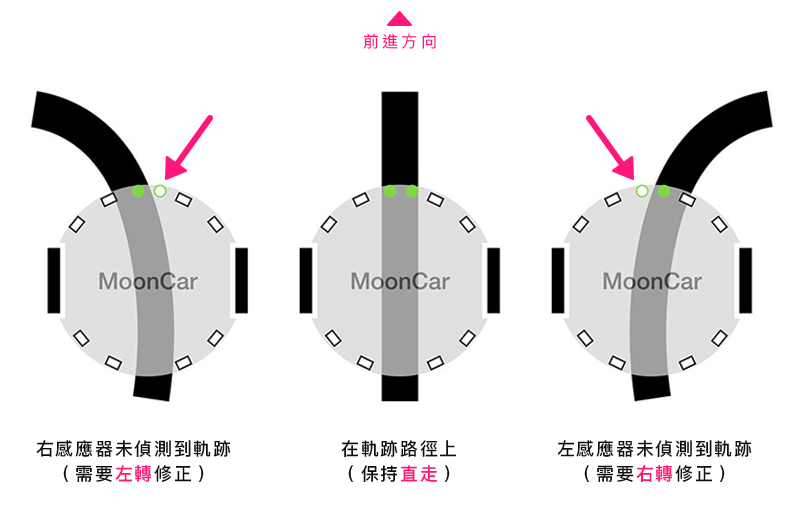
市面上有很多教人家如何使用Arduino製作出一台尋跡小車的教學,甚至在書局就能買到diy製作包了,原理多是利用紅外線感測器來判斷是否有沿著軌跡行走。我自己是沒有自己組裝過,但原理跟工具我都會使用,相信大家按著說明說多能做到!
借用一下網上教學(來源Web:AI MoonCar)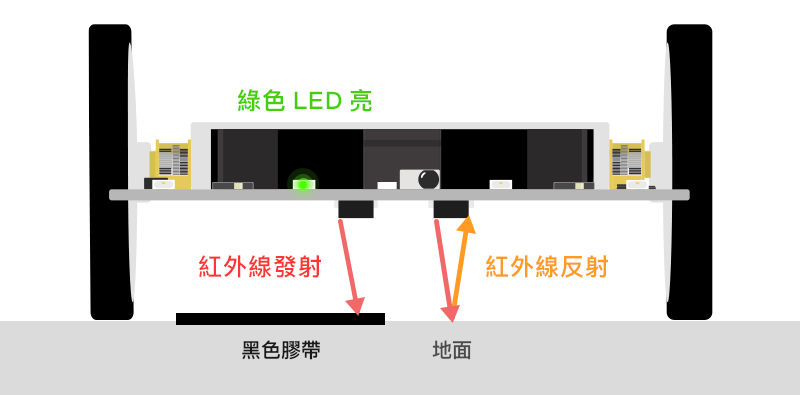
通常diy組合中都至少會附以下材料:
來小小解釋這些節點的名詞讓自己了解的更透徹
上位機:作為主要控制(決策)的角色,可以處理資料規劃路徑、直接送出控制指令給其他節點,一般來說就是電腦。
下位機:作為被控制者,接收指令將之轉換成時序訊號,達成馬達控制的任務。
上位機與下位機的溝通方式會依據指定的通訊協定去做轉換,如uart。
感測器的部份明天再來談談自走車主要會用到的那些。
稍微來介紹一下我的車給大家認識,目標是製作一台能沿著隧道前進的四輪阿克曼車。
上位機的部份是一台安裝ubuntu與ROS2的電腦,感測器要是光達。
下位機則是直接購買租裝好的阿克曼轉向系統車底盤,由STM32控制後輪馬達與轉向舵機。
製作一台自走車需要需多演算法相輔相成,大致可以分成三大部分,傳感、感知、決策。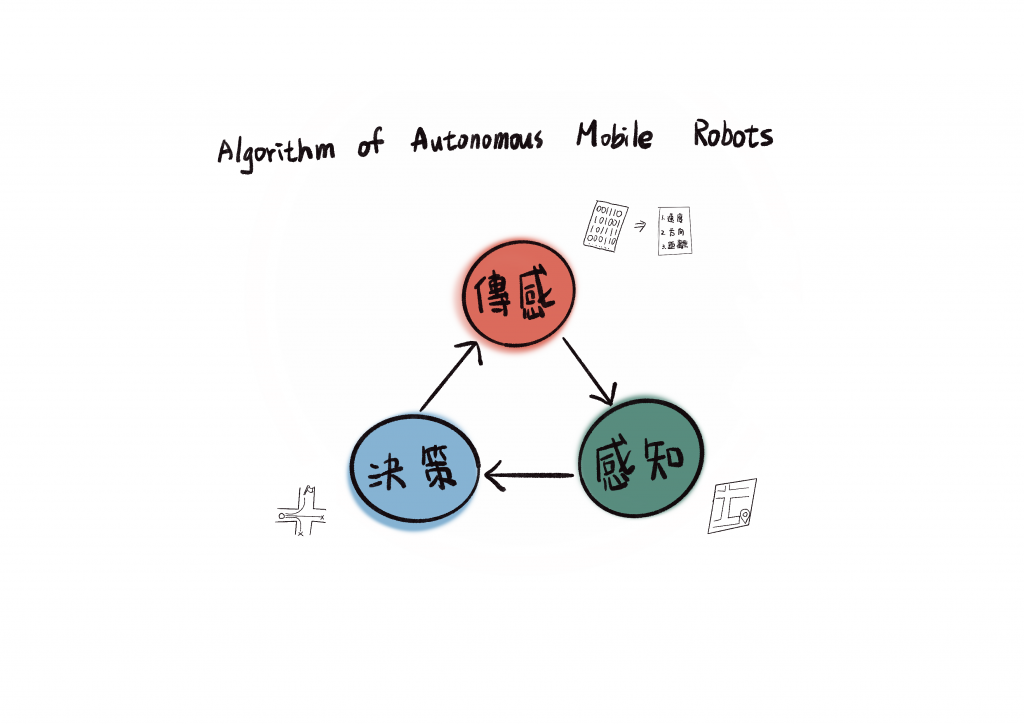
三者分別都帶入得很深XD容我用小小的腦袋瓜先從簡單的部分講起。


 iThome鐵人賽
iThome鐵人賽